AI4ALL.org project repo for hand gesture mimicking and course notebooks at UMD Summer 2019
PythonOpenCVPyTorchROS
NASA Swarmathon challenge to develop cooperative robotics to revolutionize space exploration.
C++PythonROSArduinoGazeboSLAM
Used MSER features and an SVM classifier to detect traffic signs and make a bounding box around them.
PythonOpenCV
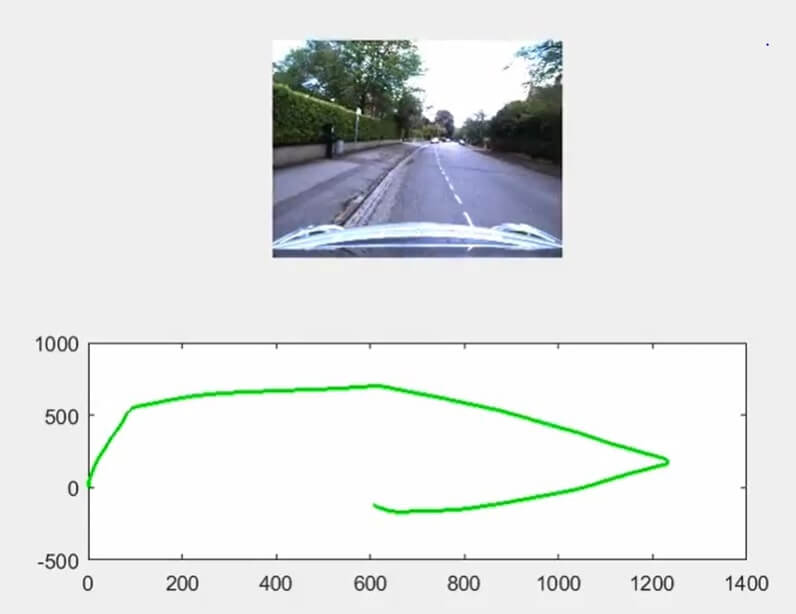
Calculated the trajectory of a camera inside a moving car. The car circles around a block. Comparisons between OpenCV built-in function and proposed function are also made.
Tracked Car, Human and Vase using Lucas-Kanade Template Tracking
Continuously tracked 3 differently colored underwater buoys.
Detected and tracked lanes from camera atop a self driving car. Turn Prediction is also included.
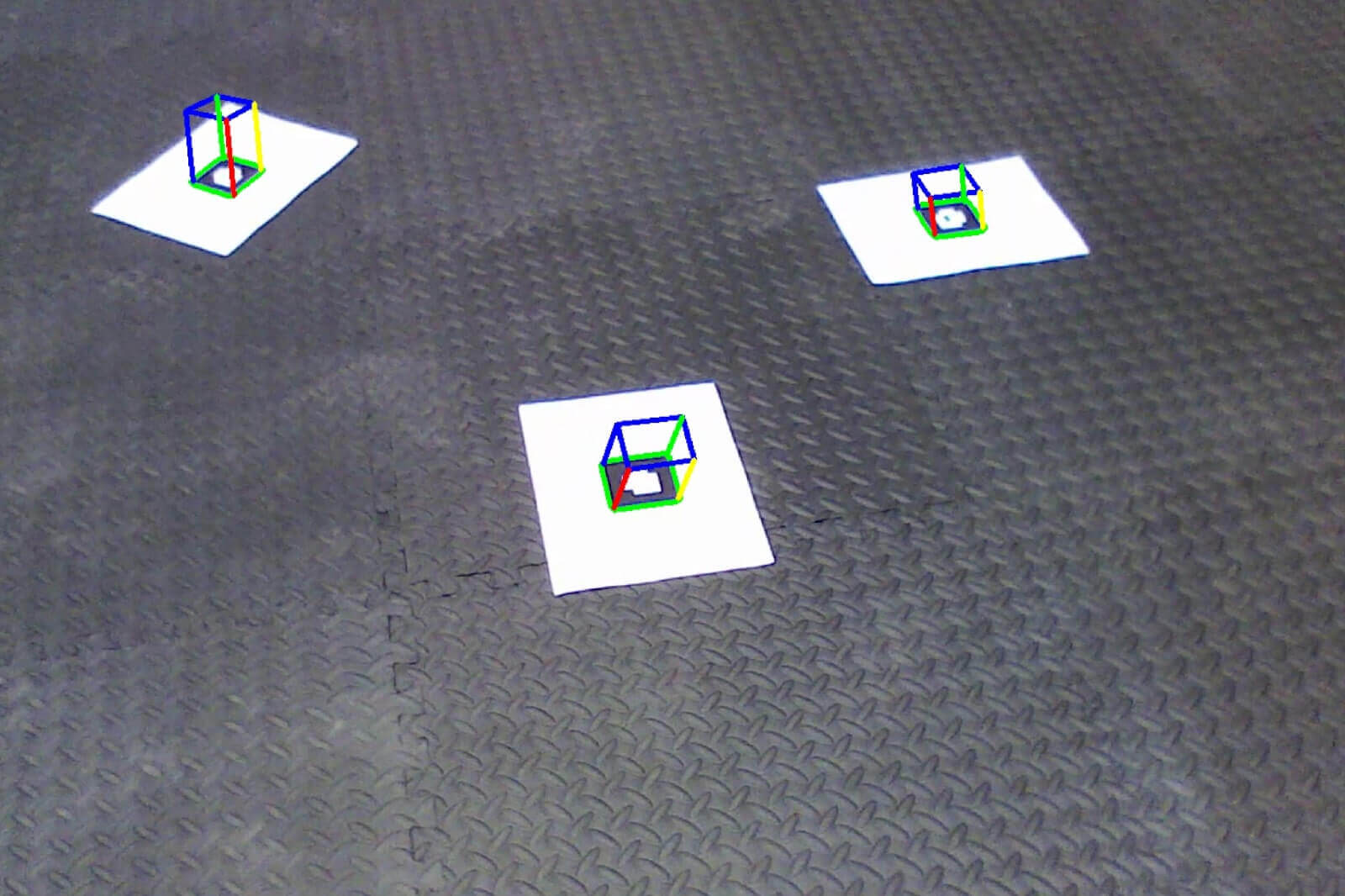
Detected and Tracked AR Tags and overlayed object onto the corresponding AR Tag.